











人類自文明誕生以來的千年愿望!
人類每個個體的終極伙伴!
智能伙伴!
輕便,去哪帶哪
重 量:≈ 12kg
長寬高 (疊):0.588*0.29*0.22m
高動態
打破 世界紀錄(近似規格)
MaxSpeed = 2.0/0.425 ≈ 4.7m/s(17Km/h)[2]
ISS 智能伴隨系統
采用無線矢量定位及控制技術
優點:
1)機器人位于人的側向余光視線內,遠遠優于常規的跟隨模式,人機交互自然融洽,安心,安全。
2)不用時刻回頭擔心機器人是否跟丟或遇到障礙物。
3)環境復雜時,人可以主動選擇更簡單的行進路線來幫助機器人通行。
SSS 超感知系統
超感知視角覆蓋
5組魚眼雙目深度感知+魚眼AI感知+3組超聲波
1組魚眼雙目深度感知角度≈150×170°
1組魚眼雙目深度感知 ≈ 4組intel realsense的感知角度
故:5組魚眼雙目深度感知 ≈ 20組intel realsense的感知角度
魚眼AI感知:人體識別等。
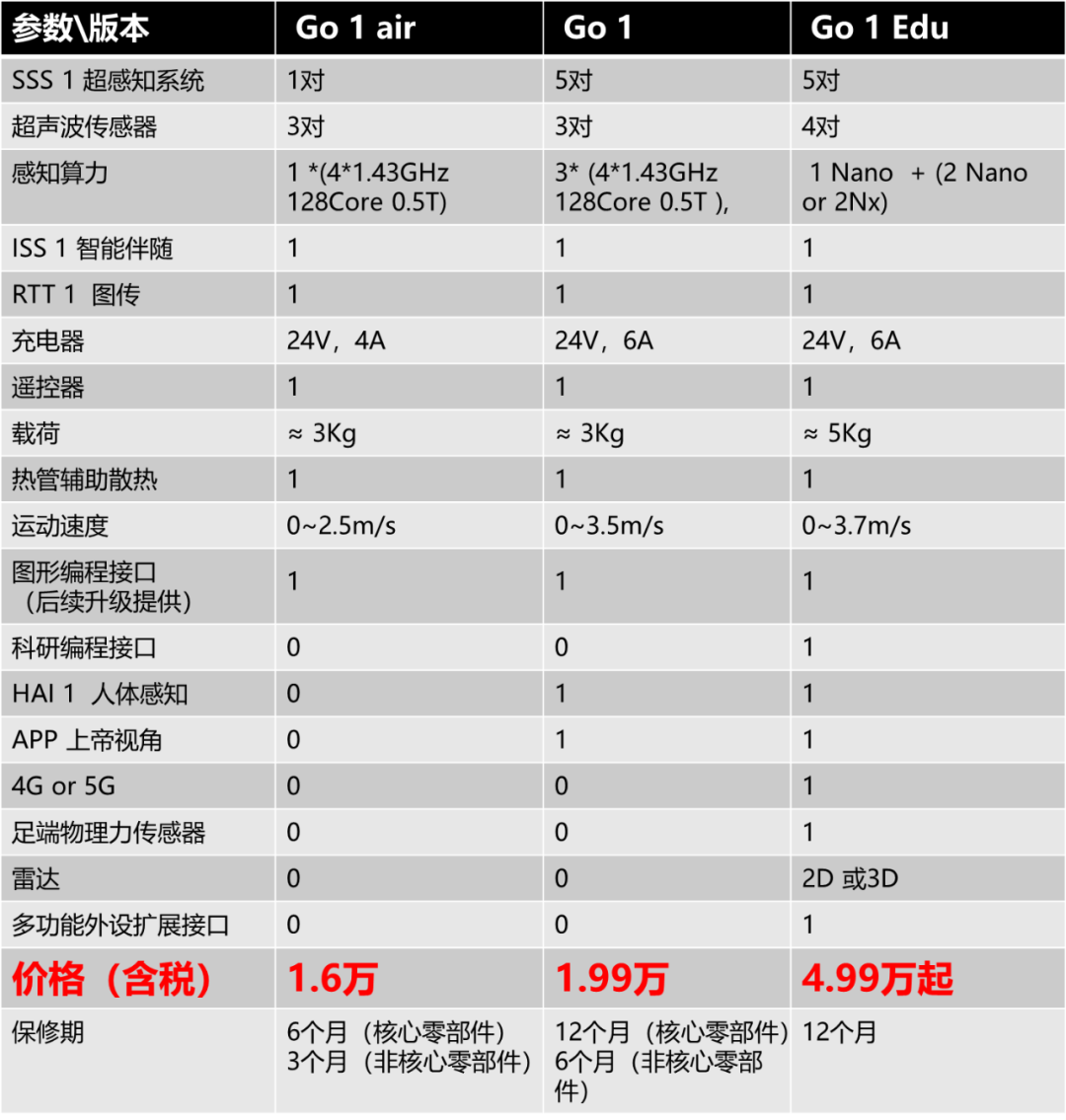
Go 1 內置超級AI算力
總計:16核頂級CPU
+ GPU(384Core,1.5TFLOPS)
作為對比,NVIDIA TX2 僅有 CPU(4核)+GPU(256Core,1.3TFLOPS),芯片單價3000+元
ISS與SSS 融合協同工作
強勁可靠的動力系統(柔韌自適應關節)
全新設計的超輕量級低噪音長壽命動力關節
機身/大腿關節 C1-8: 520g 23.70N.m;
膝關節 C1-8×1.5ratio 35.55N.m;
膝關節電機附近內置熱管輔助散熱系統
注:極限測試,請勿自行嘗試
自適應負載能力≈3~5Kg
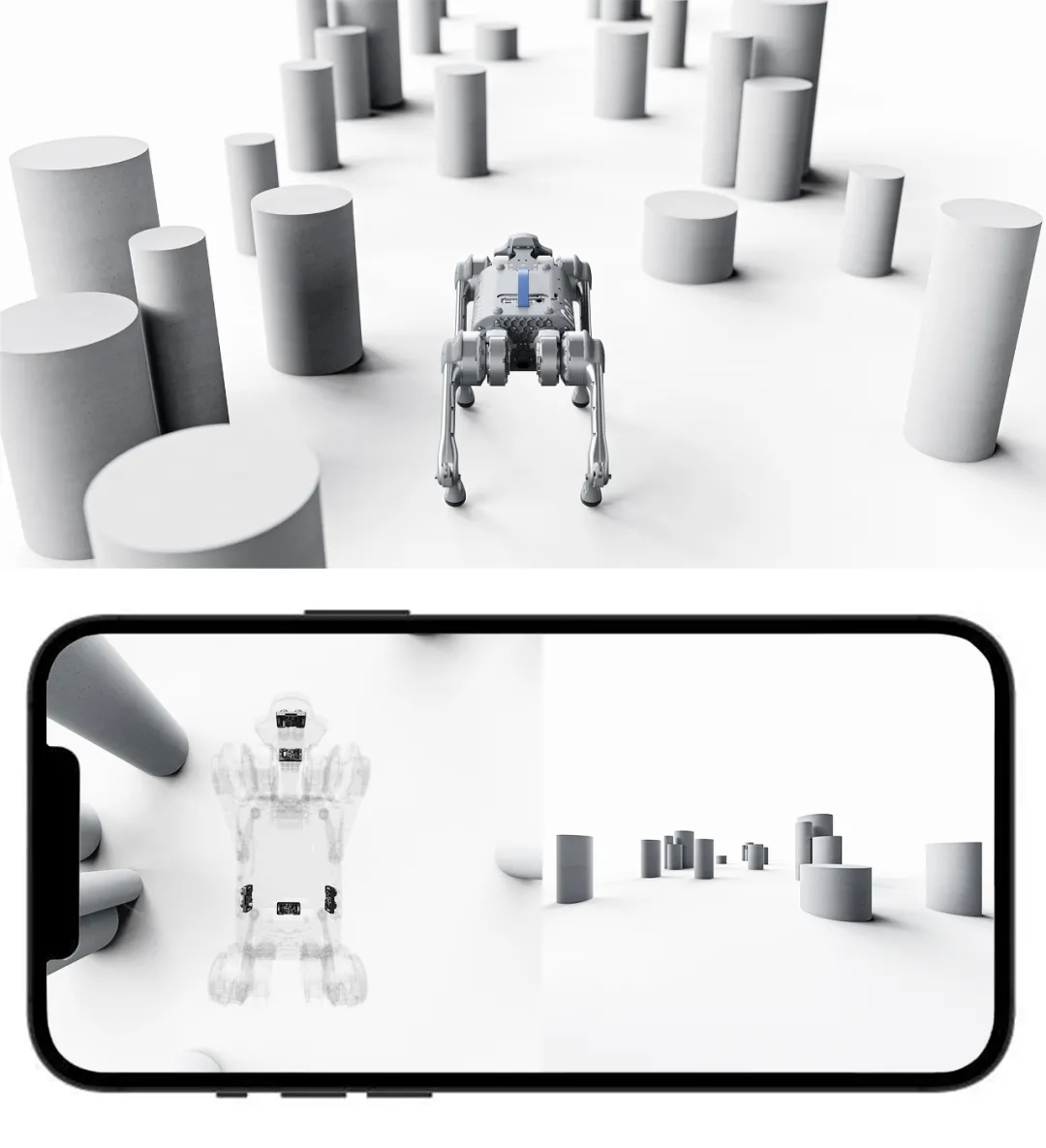
APP 上帝視角
使用機器人本身的多組相機進行多目視覺融合,從而開啟機器人遙控操作的上帝視角,使得超視距范圍內的遙操作變得和身在現場一樣簡單方便。
Unitree(宇樹)幫人類點的科技樹
1)人類歷史上,13~15年第一次實現外轉子無刷電機驅動的全自由度高性能低成本四足機器人(XDog)
2)人類歷史上,17年高性能低成本四足機器人全球第一次預售(Laikago)
3)人類歷史上,18年高性能低成本四足機器人全球第一次發貨(Laikago Pro)
4)人類歷史上,19年高性能低成本四足機器人全球第一次年出貨破百臺(Laikago Pro + AlienGo)
5)人類歷史上,20年第一次提出四足機器人陪跑概念(A1)
6)人類歷史上,21年第一次高性能四足機器人集群自動舞臺表演(牛年央視春晚)
今天,Unitree Go1
開啟移動機器人真正走進大眾生活的紀元
[1] 請周知,用戶實際到手的產品,在外觀顏色,個別細節尺寸上會和本文中機器人有所差異。功能和性能指標和本文基本一致。
[2] 此前世界記錄 MIT mini cheetah 3.7m/s;此速度是產品極限速度測試時跑出的速度,出于安全和穩定,實際客戶到手的產品會被限速。如需在戶外較長時間使用,請在涼爽的天氣。使用時請人和機器人保持一定的安全距離,尤其請勿讓未成年人碰觸上電開機的機器人。
[3] 由于主要是使用無線電信號進行矢量定位,當人和機器人之間有明顯的遮擋時,有很大概率會使機器人丟失人的實際位置。故實際用戶使用時,可以人為有意使人和機器人處于比較理想的行進路線。
[4] 為了使雙目深度感知能正常工作,請確保環境光照條件良好,障礙物表面紋理豐富。超聲波探頭之間,存在相互干擾的可能,請確保機器人周邊沒有超聲波發射裝置。
[5] 當前時刻,一般默認只會有一個相機啟用此功能。
[6] 由于人類生活環境過于復雜,在條件允許的情況下,請用戶通過選擇更開闊的路線,來盡可能減少機器人本身的自主規避功能的觸發。
地址:廣西桂林市七星區高新區信息產業園創新大廈A座C301號

