
admin2021-04-26 3205 0
多智能體協同控制系統即多個智能體組成的集合,它的目標是將大而復雜的 系統集成設成小的、彼此互相通信和協調的、易于管理的系統。多智能體協同控 制系統在表達實際系統時,通過各智能體間的通訊、合作、互解、協調、調度、 管理及控制來表達系統的機構、功能及行為特性。
多智能體系統控制具有自主性、分布性、協調性,并具有自組織能力、學習 能力和推理能力。采用多智能體協同控制系統解決實際應用問題,具有很強的魯 棒性和可靠性,并具有較高的問題求解效率。
多智能體協同控制系統是智能體技術應用及研究的一個質的飛躍,不同行業 的專家學者對之進行了深入的研究并從多個角度闡述了多智能體系統用于解決 實際問題的優勢,歸納起來,主要有以下幾點:
1、在多智能體協同控制系統中,每個智能體具有獨立性和自主性,能夠解決給 定的子問題,自主地推理和規劃并選擇適當的策略,并以特定的方式影響環 境;
2、多智能體協同控制系統支持分布式應用,所以要具有良好的模塊性、易于擴 展性和設計靈活簡單,克服了建設一個龐大的系統所造成的管理和擴展的困 難,應有效降低系統的總成本;
3、在多智能體協同控制系統實現過程中,不追求單個龐大復雜的體系,而是按 面向對象的方法構造多層次、多元化的“狼蜂”智能體,要降低系統的復雜 性,也要降低各智能體問題求解的復雜性;
4、多智能體協同控制系統是一個講究協調的系統,各智能體通過互相協調去解 決大規模的復雜問題;“狼蜂”智能體空地一體系統多智能體協同控制系統也 是一個集成系統,它采用信息集成技術,將各子系統的信息集成在一起,完 成復雜系統的集成;
5、在多智能體協同控制系統中,各智能體之間互相通信,彼此協調,并行地求 解問題,因此能有效地提高問題求解的能力。
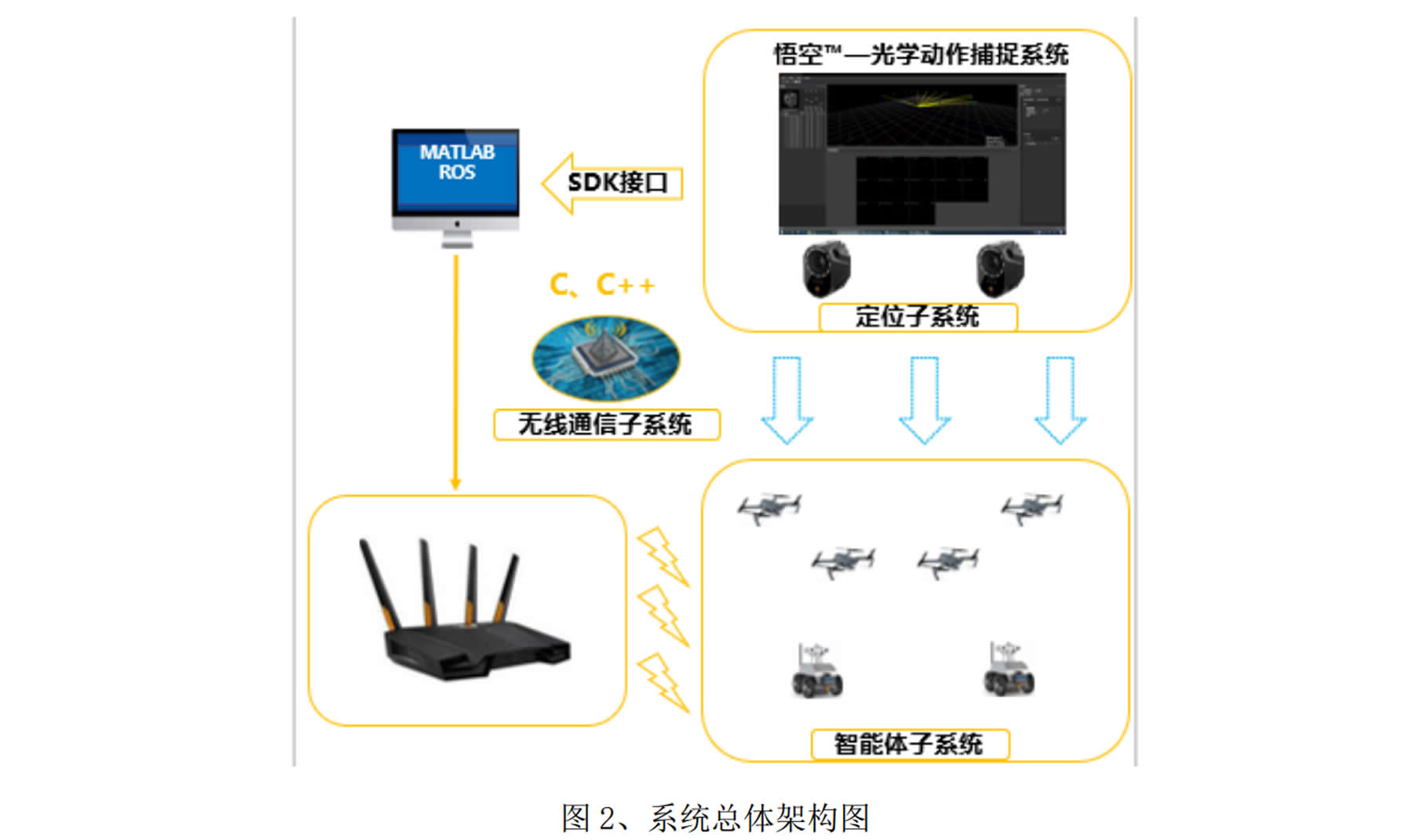
多智能體協同控制系統是在多無人車、無人機運動中,各個無人車及無人機 之間能夠保持一定的相對距離,并在速度及位置上按照預設路線或命令進行運動 的過程。基于 MATLAB/Simulink 進行硬件在環控制算法開發和驗證,可通過 MATLAB/Simulink 軟件直接獲取高精度的姿態數據和圖像數據,并提供多無人車、 無人機協同控制的 OEMO 程序。

● 室內定位系統:采用室內光學動捕技術,定位范圍 6m*6m,支持亞毫米級定 位,能夠最多同時捕捉 12 架左右的無人車或無人機;
● 被控制對象:2 臺無人車及 4 架無人機進行編隊。
● 無人機飛控:無人機 STM32F427(180MHZ)主控及 STM32F100 協處理器,內 置三組 IMU 冗余設計,外置 GPS 和光流模塊,支持 TCP/UDP 通訊協議。
● 視覺導航:256 顆 CUDA 核心,CPU 選用 Quad ARM A57,4G 內存,16G 存儲, 要擁有豐富的外設資源和強大的運算能力。
● 無人車控制器:需配置 NVIDIA TX2 主板,打在激光雷達和視覺傳感器與識 別 SDK,能夠進行 SLAM 建模和圖像跟蹤。
● 基礎開發平臺:可在 MATLAB/Simulink 軟件平臺進行控制算法研究,支持自 動生成代碼,通過無線 WiFi 下載到無人車控制板和無人機飛控板。
● 擴展開發語言:支持 C、C++、Python 編程,適合有一定代碼開發能力的學 生,進一步錘煉代碼編程能力;
● 基于模型(MBD)的設計:MATLAB/Simulink 中提供了 ROS 的支持包,可試 驗 Simulink 控制模型到 ROS 系統代碼的自動生成,降低了 ROS 系統控制模型的 開發難度,適合大眾化本科教學實驗;
● 可用于無人系統的動態建模和控制研究、運動規劃、避障控制、多信息融 合、編隊控制、多智能體協同控制、無人系統自主控制、足型機器人步態分析等。
多智能體協同控制系統包括實時定位系統、實時控制系統、多智能體協同控 制系統,以及與之配套的無線網絡通信裝置。 實時定位系統采用光學動捕技術,主要由紅外光學動作捕捉鏡頭、操作及 分析處理軟件和配件組成,可捕捉輸出智能體精準的三維空間數據,系統精度 可達亞毫米級。
實時控制系統是一臺高性能臺式服務器,運行 Windows7 以上操作系統,部 署用于圖像處理、定位跟蹤、算法開發、模型編譯下載以及進行數據堅實分析 的軟件,可同時作為開發主機和 Windows 目標機使用。 多智能體協同控制系統是指在上位機 MATLAB/Simulink 軟件平臺上進行控 制算法開發,通過無線通信完成對若干無人車、無人機的集群協同控制。
多智能體協同控制系統實驗平臺的實驗室布置主要包括人機操作區和設備 實驗區,具體如下圖所示:
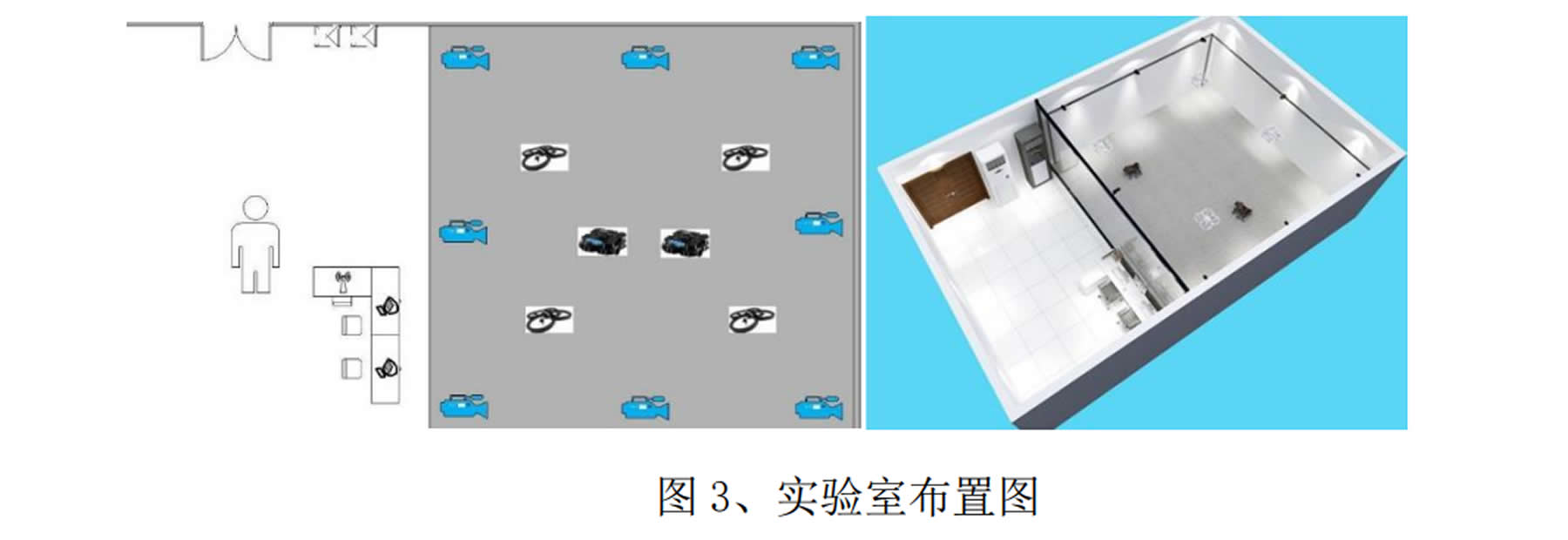
● 人機操作區:該區域主要用于研究人員進行上位機操作開發,可在該區域控 制和觀察實驗設備區內的實驗對象,主要設備包括卓翼、上位機、路由器及 必要的實驗設施。
● 設備實驗區:該區域主要用來進行圖像獲取、無人車及無人機的編隊控制實 驗,進行實驗時實驗人員禁止進入,主要有 8 臺攝像頭、2 臺無人車、4 架 無人機以及必要的保護設施。
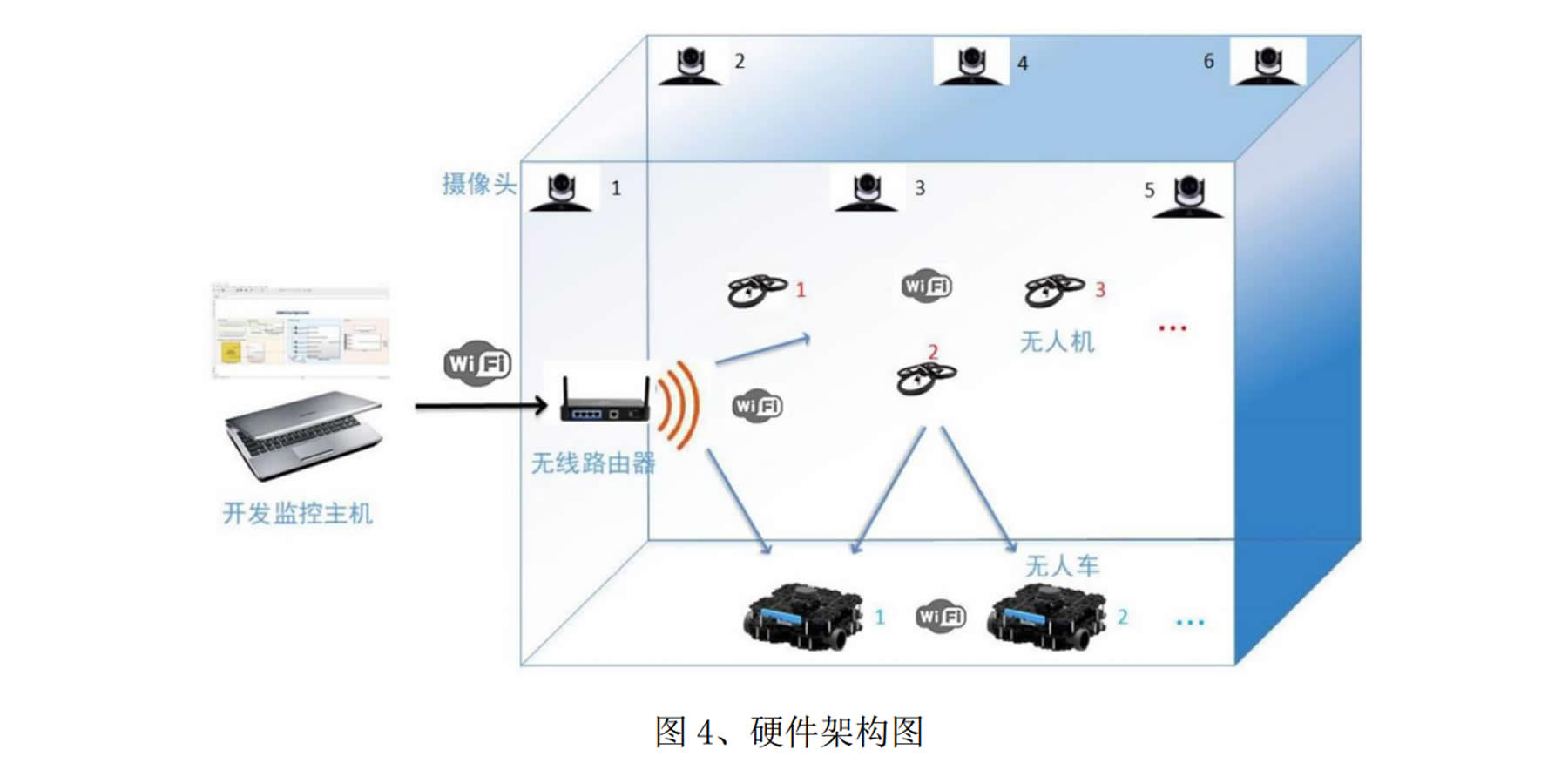
上圖為平臺系統硬件構成圖,主要包括如下:
1、實時定位系統通過多個攝像頭完成無人車、無人機的圖形采集,將采集到的 數據進行處理分析獲得無人車、無人機精確的位置和姿態信息,并將處理結 果發送給開發主機。
2、實時控制系統開發主機主要完成算法開發和 Windows 實時目標機功能:算法 開發主要基于 MATLAB/Simulink 實現,結合實時控制軟件,可實現代碼生 成、編譯和部署;開發主機可作為 Windows 實時目標機,運行 Simulink 生 成的 Windows Target 目標代碼。
3、多智能體協同控制系統包括若干無人車、無人機,每個無人車、無人機上安 裝高性能計算單元和外圍傳感器,兼容 MATLAB/Simulink,能夠基于 MATLAB/Simulink 進行控制器開放式硬件,實現多智能體協同控制、視覺 SLAM 等復雜算法研究。
備注:為保障實驗、學習人員的安全,進行編隊控制、控制開發、步態分析、 運動規劃等實驗時,實驗、學習人員智能在開發主機端操作,不可進入編隊活 動工作區域,確認無人機、無人機車、足型機器人停止后才能到工作目標工 作、連接線纜、調試設備等操作。
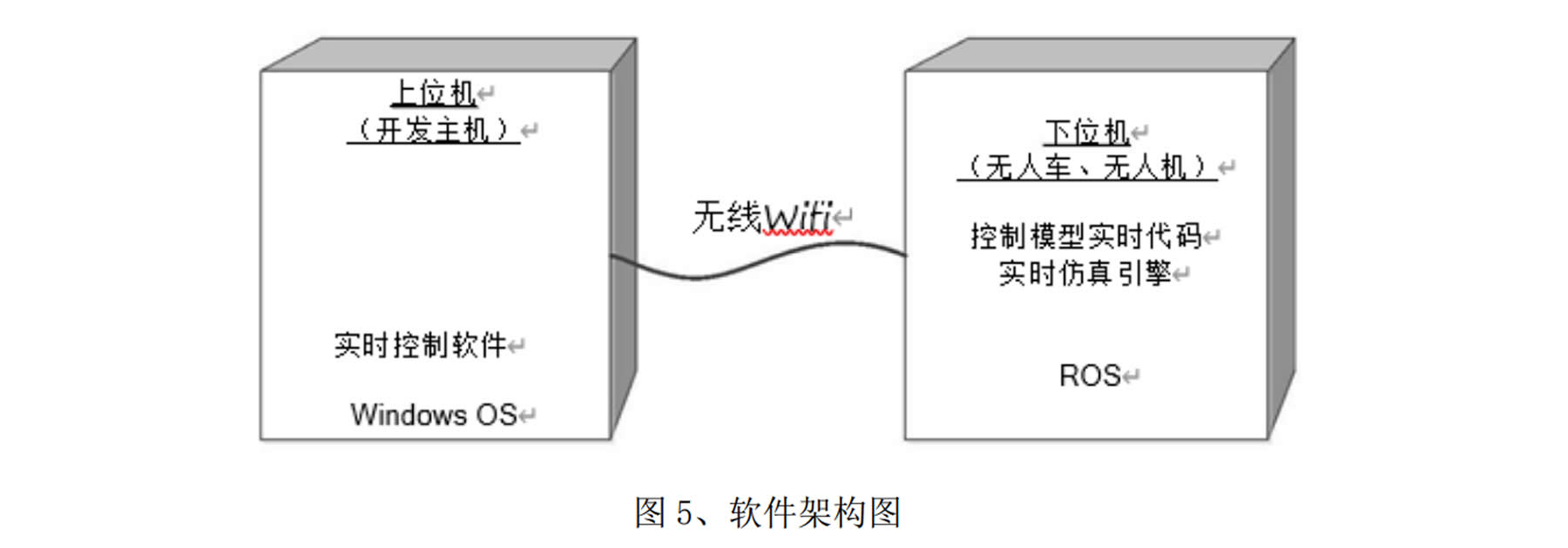
系統軟件分為“上-下位機”兩部分,主要包括:
1、上位機軟件:基于 Windows 操作系統個,提供圖像定位處理的軟件、ROS 實 時示例軟件、地面站軟件、實時控制軟件;
2、下位機軟件:基于 ROS 系統,提供無人車/無人機控制板的硬件驅動、實時仿真引擎以及控制模型實時代碼。
更多內容……(略)
地址:廣西桂林市七星區高新區信息產業園創新大廈A座C301號

